使用Compute Shader计算屏幕空间接触阴影
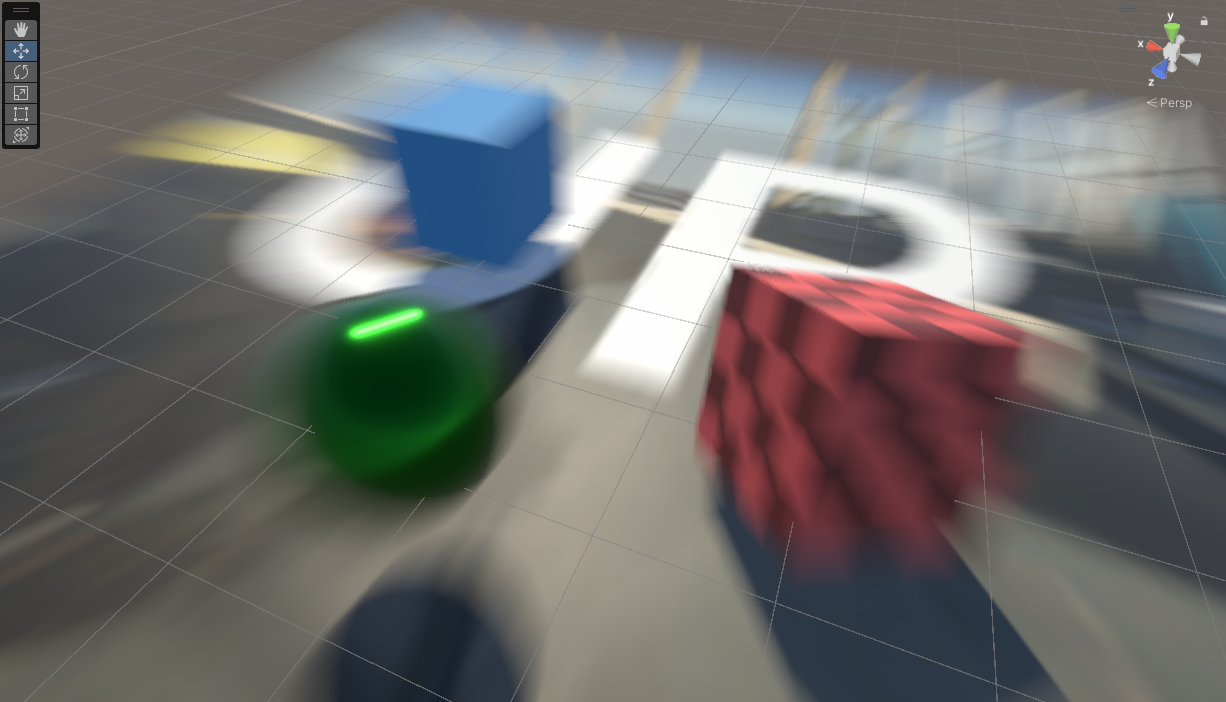
屏幕空间接触阴影 屏幕空间接触阴影是用来解决普通的阴影贴图精度不够的问题而提出来的一种通过深度图在屏幕空间计算阴影的方法。索尼的Bend Studio的Graham Aldridge在Sigraph 2023的索尼创作者大会上,介绍了往日不再(Days Gone)中计算屏幕空间接触阴影的方式,这里可以找到演示文稿和参考代码。 本篇文章相当于是Radial Dispatch系列的第三篇文章了,与上一篇文章一样,这篇文章是基于径向分派Compute Shader中相关算法的实际应用,具体的缓存方式也可以参考上一篇文章使用Group Shared Memory加速径向模糊,这里就不再赘述了。实际上我发现了这样计算接触阴影的一个缺陷,就是不太好计算软阴影了,由于缓存的限制,随机采样只能在一个很小的范围内分布,基本上用不上了。由于使用的是屏幕空间的深度图的信息,加上厚度检测之后很容易出现漏面的问题,封面中的瑕疵也有一部分是来自于我的Relaxed Cone Step Mapping本身深度值的瑕疵,屏幕上半部分的阴影就好很多。这就当作是一个Proof of Concept吧,之后有机会的话再回来优化优化。 本文使用的是Unity 2022.3.21f1,URP版本是14.0.10。 具体的代码 ContactShadowComputeShader.compute 核心的代码来自于前一篇文章径向分派Compute Shader。前一篇文章在循环中是通过统一步长进行采样的,会采样到四个像素中间因此需要双线性插值,这次我们固定水平或者竖直方向的步长为一个像素,这样我们只需要在一个方向上进行线性插值了。由于深度和颜色信息是两种不同的信息,我们仅对距离很近的深度进行线性插值,对于距离较远的两个深度值,我们使用离采样点最近像素的深度值。至于如何判断深度远近,我使用了和屏幕空间反射中相同的_ThicknessParams,默认物体的厚度为linearSampleDepth * _Thickness.y + _Thickness.x。 #pragma kernel ContactShadowPoint #pragma kernel ClearMain // #pragma warning(disable: 3556) #include "Packages/com.unity.render-pipelines.core/ShaderLibrary/Common.hlsl" #include "Packages/com.unity.render-pipelines.universal/ShaderLibrary/Core.hlsl" #define THREAD_COUNT 128 Texture2D<float4> _ColorTex; Texture2D<float> _CameraDepthTexture; RWTexture2D<float4> _RW_TargetTex; float3 _LightPosWS; float4 _LightPosCS; float2 _LightPosSS; float2 _ThicknessParams; float4 _TextureSize; float _LightRange; float _Debug; struct DispatchParams { int2 offset; int count; int stride; int xMajor; }; StructuredBuffer<DispatchParams> _DispatchData; int GetDispatchType(int index, out int dispatchIndex, out DispatchParams dispatchParams) { for (int i=0; i<8; ++i) { dispatchParams = _DispatchData[i]; dispatchIndex = dispatchParams....